Роботы своими руками - сделай сам
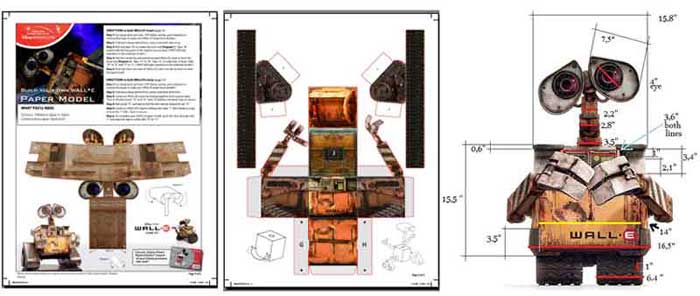
Схема робота из бумаги » Роботы своими руками Скачайте и распечатайте схему, расположенную справа. Аккуратно вырежьте ее по контуру, затем согните все линии сгибов. Удобнее начать склеивать робота с головы.






:no_upscale()/imgs/2023/08/09/09/6096696/432080b81dd0d55a50007df684ea6d4b00cbb361.jpg "Как сделать робота своими руками в домашних условиях | spaman-go.ru")


 / Хабр")

")
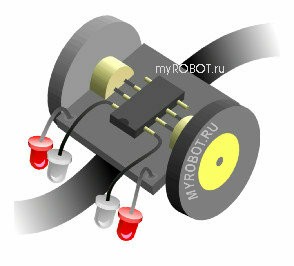
Сделать такого робота конечно можно используя специализированные микросхемы или наборы конструкторы из магазинов. Предлагаю не сильно замарачиваться и сделать схему содержащую минимум деталей, но выполняющую функции тех самых самодельных BEAM роботов которые многие собирают из кучи транзисторов и микросхем. Эта простая конструкция , обладая теми же недостатками, что и Tilden H-BRIDGE , а именно пропускающая ток при освещении обоих фоторезисторов, делает все то же самое , но с гораздо меньшим количеством деталей. Так как фоторезисторы довольно слабы по мощности, я слегка усовершенствовал схему , добавив в неё пару мощных транзисторов из лампочки экономки. Фото-Резисторы установленные в качестве смещения хорошо открывают и закрывают транзисторы рассчитанные на ток до 15 ампер, чего более чем достаточно для питания поворачивающего платформу двигателя.







В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS. Это будет наш первый простой робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись.